羽ばたき飛行シミュレーション
Keywords: 生物メカニズム, 羽ばたき飛行, MAV, 有限要素法, ALE, 流体力学, 多目的設計
羽ばたき飛行とMAV (Micro Air Vehicle)
鳥や昆虫の羽ばたき飛行は彼らの生きるスケールにおいて非常に優れた飛行方法です。近年ではMAVと呼ばれる小型の飛行ロボットに応用すべく彼らの飛行メカニズムに注目が集まっています。

図1 生物の羽ばたき飛行 (ハチドリのホバリング)
羽ばたき飛行のシミュレーションと多目的設計
私たちの研究室ではMAVへの応用を目指し、シミュレーションによる羽ばたき飛行の分析を行なっています。また、2次元シミュレーションと3次元シミュレーションを併用して効率的に最適な羽ばたき方の設計を行なう手法を開発しています。
- シミュレーション (数値実験) を用いる利点
- 動きのパラメータや実験条件を変えての再実験が容易
- 実験では計測が難しい流れのようすや力の分布を詳細に観測可能
- 多目的設計
- 生物の羽ばたき方は必ずしもMAVに適したものとは言えない
- 様々な羽ばたき方の飛行性能をシミュレーションで評価し、最適化のアプローチを用いて設計
- 単純に一つの目的関数 (速度・エネルギー効率等) を最適化するだけではなく、複数の目的関数が適切にバランスする点を最適点としたい。
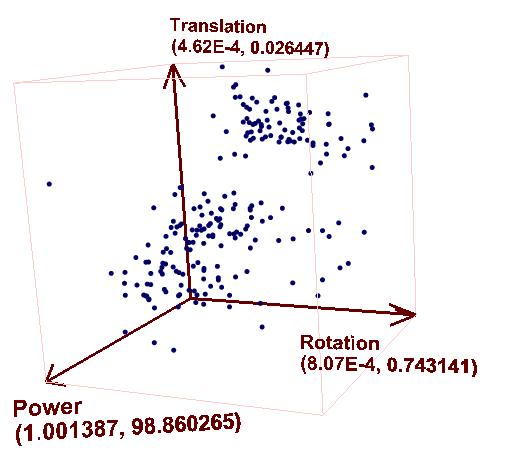
図3 飛行性能の分析: ホバリング時を想定して消費エネルギーと胴体のゆれ幅 (上下左右方向と傾き) を目的関数とし、様々な羽ばたき方をした場合の目的関数値をプロットしています。
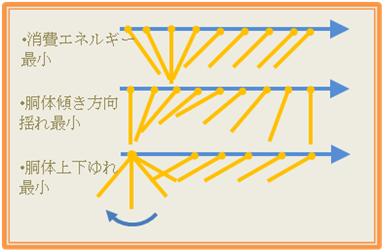
図4 翼の動きの例: 各目的関数単独を最適化する翼断面の動かし方を図3の各点から抽出しました。
- 並列化等のシミュレーション高速化技術 (河合さんの所にリンク?) により詳細かつ効率的な評価が可能
- 計算手法
- ALE有限要素法による非定常非圧縮粘性流体解析
- メッシュスムージングには疑似弾性体・ラプラス方程式等を利用
補助ツールや技術の開発・利用
シミュレーションで得られた流れのようすや力の分布をより直感的に解釈できるよう、AR (拡張現実感) 技術を用いた可視化ツールを開発しました。
関連文献
- 犬塚一徹, 山田知典, 吉村忍, “小型人工飛翔体の羽ばたき運動の多目的設計,” 機械学会論文集B編, Vol. 75, No. 754, pp. 1215–1221, 2009.