都市交通シミュレーション
Keywords: 交通流シミュレーション, マルチエージェント, 渋滞解析, ITS, 環境的に持続可能な交通
MATES (Multi-Agent-based Traffic and Environment Simulator) の開発
大規模さと精密さを兼ね備え、交通現象の多面的な解析・予測に利用可能な知的マルチエージェント交通流シミュレータMATES (Multi-Agent-based Traffic and Environment Simulator) の研究開発を行っています。自動車をはじめとする交通主体を知的エージェントとしてモデル化し、エージェント間の相互作用の結果として渋滞や事故などの交通現象を再現します。
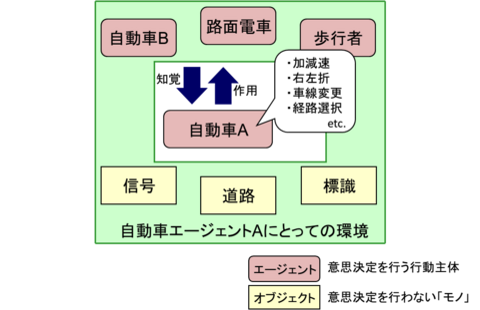
図1 MATESにおける環境とエージェント
MATESのコンセプトと研究ターゲット
MATESは交通主体を離散的に扱うミクロ (microscopic: 微視的) シミュレータの1つです。私たちはMATESを使い、交通渋滞の分析だけでなく、ITS (Intelligent Transport Systems: 高度道路交通システム) の導入効果の予測、交通弱者や環境にやさしい交通システムの設計等などにも取り組んでいます。これらの課題に対応するため、MATESではエージェントを過度に単純化することなく、人間の知的な振る舞いをそのままモデル化しています。
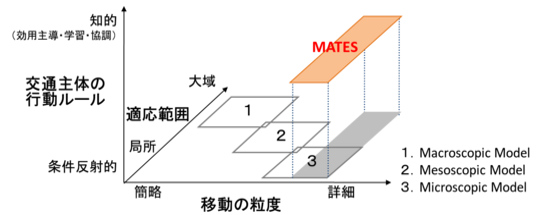
図2 交通流シミュレータの分類とMATESの位置付け (目標を含む)
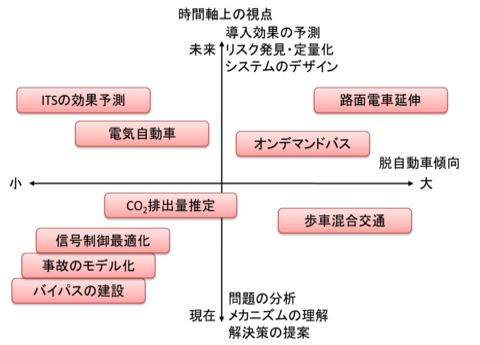
図3 MATESの研究ターゲット
研究例1: 路面電車軌道延伸の影響評価
路面電車の軌道延伸が実際に提案されている都市において、延伸が既存の道路交通に及ぼす影響をシミュレーションによって予測します。また金融工学的手法を用いてプロジェクトが事業者や地元自治体にもたらす価値の定量的な評価を行っています。
図4 路面電車延伸シミュレーション (岡山県岡山市)
研究例2: 交通事故の再現
実世界では自分の意思決定に必要な情報が全て得られるとは限りません。ドライバーの視野と視線移動をモデル化し、認知エラー (認知すべき対象物の見落とし) によって交通事故が発生する状況をMATESで再現します。また、ITS技術によって交通事故につながる認知エラーの発生を抑制できるか確かめています。
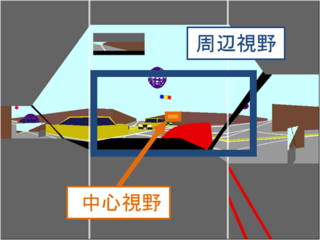
図5 ドライバーの視覚による認知を考慮したシミュレーション
研究例3: 歩車混合交通
自動車への過度の依存を抑え、環境と交通弱者に優しい都市交通を目指すときには、自動車と歩行者が相互作用する場面が現在よりも増すと考えらます。自動車交通流シミュレータに新たに歩行者モデルを追加して相互作用ルールを定義し、歩車混合交通を再現します。
図6 歩車混合交通シミュレーション (渋谷ハチ公前スクランブル交差点): 緑色の歩行者を繋ぐ線分は隊列の形成を表しています。
関連文献
- 吉村忍, 西川紘史, 守安智, “知的マルチエージェント交通流シミュレータMATESの開発”, シミュレーション, Vol. 23, No. 3, pp. 228–237, 2004.
- S. Yoshimura, “MATES: Multi-Agent Based Traffic and Environment Simulator — Theory, Implementation and Practical Application”, Computer Modeling in Engineering and Sciences, Vol. 11, No. 1, pp. 17–25, 2006.
- 藤井秀樹, 仲間豊, 吉村忍, “知的マルチエージェント交通流シミュレータMATESの開発 (第二報: 歩行者エージェントの実装と歩車相互作用の理論・実測値との比較)”, シミュレーション, Vol. 25, No. 4, pp. 274–280, 2006.
- 吉村忍, 関計哉, 藤井秀樹, “高速道路合流部の知的マルチエージェントシミュレーション”, 交通工学, Vol. 44, No. 1, pp. 81–90, 2009.
- 小橋敏浩, 文屋信太郎, 藤井秀樹, 吉村忍, “知的マルチエージェント交通流シミュレータMATESの並列化”, 日本計算工学会論文集, Vol. 2010, 20100003, 2010.
- 藤井秀樹, 吉村忍, 高野悠哉, “マルチエージェント交通流シミュレーションにおける交通事故モデリング”, 人工知能学会論文誌, (採録決定).